1.機械学習を使って触覚用のセンサーを改良(1/2)まとめ
・ウェアラブル端末にとって触覚は直感的なフィードバックのためのますます重要
・触覚はLRAと呼ばれる触覚信号を提供する小さなリニアモーターで実現できていた
・しかし圧力の検知は別のハードウェアが必要になる傾向があり簡単ではなかった
2.LRAとは?
以下、ai.googleblog.comより「Haptics with Input: Using Linear Resonant Actuators for Sensing」の意訳です。元記事の投稿は2020年11月18日、Artem Dementyevさんによる投稿です。
元タイトルを直訳すると「入力に伴う触覚:センシングに線形共振アクチュエータを使用」となってセンサー系のお話は専門的なタイトルになりすぎるので悩んで意訳してます。従来のセンサー類は数値としては微妙な変化を計測出来ていてもその微妙な変化を感じ取った制御が難しかったのですが、機械学習を使うとそういったきめ細かい制御が可能になりますねってお話です。edgeの話でもあります。センサー系に興味をお持ちの方は以下のタイトルもどうぞ。
機械学習を用いて賢い繊維を実現(1/3)
機械学習を用いて賢い繊維を実現(2/3)
機械学習を用いて賢い繊維を実現(3/3)
2021年11月追記)後続研究として「VHP:人体装着型アプリのために振動を触覚で伝達するオープンソースの基盤」が発表されました。
ウェアラブルなデバイスをイメージしたアイキャッチ画像のクレジットはPhoto by Joshua Gandara on Unsplash
ウェアラブルやハンドヘルドデバイスのサイズが小さくなるにつれて、触覚は、バイブレーションやタッチスクリーンのボタンを押したときの微妙な「クリック」感覚など、フィードバックのためのますます重要になります。
ほぼすべてのウェアラブルデバイスやスマートフォンに遍在する触覚を使ったフィードバックは、通常、線形共振アクチュエータ(LRA:Linear Resonant Actuator)によって実現されます。これは、共振を利用して小さなパッケージで強力な触覚信号を提供する小さなリニアモーターです。
ただし、触覚によるフィードバックを有効にするために必要なタッチおよび圧力検知は、追加の別個のハードウェアに依存する傾向があり、システムの価格、サイズ、および複雑さが増します。
ACM UIST 2020で発表された論文「Haptics with Input:Back-EMF in Linear Resonant Actuators to Enable Touch、Pressure and Environmental Awareness」では、広く利用可能なLRAで、皮膚、物体、表面との接触に関する情報を中継できることに加えて、タッチ、タップ、圧力などの幅広い外部情報を感知できることを示しています。
私達はこれを既製品のLRAで実現しました。これは、カスタム波形の短いパルスを多重化することによって、逆起電力電圧(back-EMF voltage)を使用したセンサー検知を可能にするように設計されています。
表現力豊かな別個のボタンと振動触覚インターフェースを可能にするこのアプローチの可能性を示し、このアプローチがモバイルデバイスの統合された触覚モジュールに豊富なセンシングの機会をもたらし、より少ないコンポーネントでセンシング機能を向上させる方法を示します。
私達の技術は、振動周波数の自動調整に逆起電力センシングを採用しているため、多くの既存のLRAドライバーと互換性がある可能性があります。
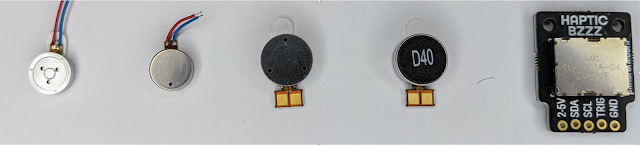
この手法を採用可能な様々な既製のLRA
LRAでの逆起電力原理
LRAエンクロージャーの内部には、小さな塊に取り付けられた磁石があり、両方ともバネ上で自由に動きます。磁石は、ボイスコイルによって導入された励起電圧に応答して移動します。
振動する質量の動きは、磁束の変化率に比例する電圧であるcounter-electromotive force(日本語訳はback-EMFと同じ逆起電力)、またはback-EMF(逆起電力)を生成します。振動速度が大きいほど逆起電力電圧が大きくなり、質量静止時は逆起電力電圧がゼロになります。
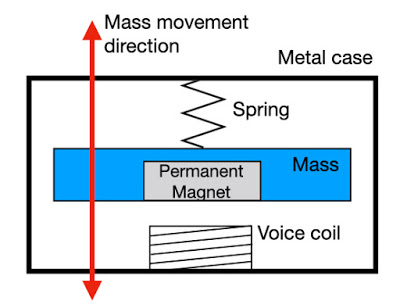
LRAの構造
センシング用のアクティブback-EMF
振動中にLRAに軽くタッチまたは接触すると、エネルギーが接触物体に放散されるため、内部質量の速度が変化します。
これは、人体など、圧力によって変形する柔らかい素材で効果的です。例えば、指は、LRAに対して平らになるときに、接触力に応じて様々な量のエネルギーを吸収します。少量のエネルギーでLRAを駆動することにより、逆起電力電圧を使用してこの現象を測定できます。
センシングに逆起電力動作を活用することは能動的なプロセスです。これを可能にした重要な洞察は、振動、音、および電力消費を最小限に抑えながら継続的なセンシングを可能にする特別なオフレゾナンスドライバー波形(off-resonance driver waveform)の設計でした。
LRAを使ったタッチおよび圧力検知
2つのLRA導線間のフローティング電圧から逆起電力を測定します。
これを実現するためには、外部から受ける干渉を避けるためにモータードライバーを短時間切断する必要があります。
ドライバが切断されている間、質量はまだLRA内で振動しており、振動する逆起電力電圧を生成します。市販の逆起電力検知LRAドライバーは生データを提供しないため、小さな逆起電力電圧をピックアップして増幅できるカスタム回路を設計しました。また、振動とエネルギー消費を最小限に抑えるカスタムドライブパルスを生成しました。
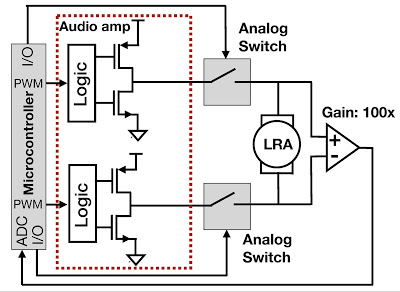
アクティブセンシング用のLRAドライバーと逆起電力測定回路の簡略図
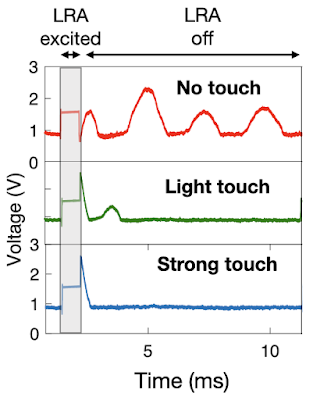
短いドライブパルスでLRAを励起した後、ばね上の質量の継続的な振動により、逆起電力電圧が変動します。(上部、赤い線)。指で押したときの逆起電力信号の変化は、加えられた圧力によって異なります(中央部と下部の緑線と青線)。
3.機械学習を使って触覚用のセンサーを改良(1/2)関連リンク
1)ai.googleblog.com
Haptics with Input: Using Linear Resonant Actuators for Sensing
2)dl.acm.org
Haptics with Input: Back-EMF in Linear Resonant Actuators to Enable Touch, Pressure and Environmental Awareness(PDF)

