
1.機械学習を使用して大腸癌の内視鏡検査の精度を向上(1/2)まとめ
・大腸内視鏡検査で悪性のポリープを検出し、除去する事で大腸癌を予防する事が可能
・内視鏡医は検査中に平均して22%~28%のポリープを見逃している可能性が示唆されている
・C2D2は結腸のどの領域の撮影状態が不十分かを識別し内視鏡医の検査作業を手助けできる
2.C2D2とは?
以下、ai.googleblog.comより「Using Machine Learning to Detect Deficient Coverage in Colonoscopy Screenings」の意訳です。元記事の投稿は2020年8月28日、Daniel FreedmanさんとEhud Rivlinさんによる投稿です。
機械学習を使って大腸の内視鏡検査の精度を向上するお話です。大腸の内視鏡検査を実際に受けた事のある身としては、今回のお話は大変実感がありました。
当日、早起きしてに下剤を2リットル飲むのが辛かった記憶もありますが、上からカメラを入れるのかと思ってたら、当たり前ではありますが、下からであり、入れる時ってやっぱり曲がりくねっていて狭いためか、結構ゲシゲシやるので麻酔の点滴は打っていても痛みを感じるくらいの時がありますし、お腹の中で何かが蠢めいて気持ち悪くなってくる感触がありますし、女医さんと看護師さんに見守られながら自分の大腸壁が隣の大画面スクリーンに映し出されるのを横目で見る非日常体験であり、看護師さんには、笑顔で「カッチカッチに体が固まってますよ、リラックスしてくださいね~」と言われたのですが「この状況でリラックスは非常に難度が高いと思います」と息も絶え絶えに訴えたのを思い出します。
私の場合は、念のための検査だったと言う事もあるのかもしれませんが、抜く時に見ていくのですが、結構サーっと抜いていたので曲がりくねっている箇所などはあまりしっかりとは見れてなかったとは思います。ただ患者の立場的には早く終わってくれ~と願っていたので、患者さんに負担をかけないようにするためにはある程度のスピーディーさも必要なのだろうなとも思います。
アイキャッチ画像のクレジットはPhoto by Tom Claes on Unsplash
2021年8月追記)見落としやすい腫瘍の検出を支援する後続研究が発表されています。
大腸癌(CRC:Colorectal cancer)は世界的な健康問題です。米国で2番目に死に至る癌であり、年間90万人が死亡すると推定されています。致命的な癌ではありますが、ポリープと呼ばれる結腸内の小さな前癌性病変を癌化する前に取り除くことにより、CRCを予防することができます。
実際、腺腫(大腸癌になる可能性がある腫瘍性ポリープ)の検出率(以下、ADR(Adenoma Detection Rate)とします。検査中に医師が少なくとも1つのポリープを発見する割合です)が1%増加すると、interval CRCの割合が6%減少する可能性があると推定されています。
大腸内視鏡検査は、ポリープの検出と除去のための最も標準的な手順と考えられています。残念ながら、文献「Factors influencing the miss rate of polyps in a back-to-back colonoscopy study」では、内視鏡医が結腸内視鏡検査中に平均して22%~28%のポリープを見逃していることを示しています。更に、癌性になる可能性のあるポリープ(腺腫)の20%~24%が見逃されます。
内視鏡医がポリープを見逃す原因となる可能性のある2つの主な要因は次のとおりです。
(1)ポリープは内視鏡の視野内に表示されていますが、内視鏡医は、おそらくポリープのサイズが小さいか形状が平坦であるため、見落としています。
(2)内視鏡医が検査中に大腸内を完全に映すように操作していないため、ポリープは内視鏡の視野内に表示されていません。
論文「Detecting Deficient Coverage in Colonoscopies」では、C2D2(Colonoscopy Coverage Deficiency via Depth algorithm)を紹介しています。C2D2は、大腸内視鏡検査範囲を改善するための機械学習ベースのアプローチで、深度アルゴリズムを使って大腸内視鏡検査で撮影されなかった範囲をカバーします。
C2D2アルゴリズムは、内視鏡医が内視鏡検査中に撮影した大腸内画像を使って、結腸の立体構造を再構成し、それに基づいて、結腸のどの領域が撮影され、どの領域が撮影されなかったかを識別します。
C2D2は、結腸の特定の領域の撮影が不十分かどうかをリアルタイムで示すことができるため、内視鏡医はその領域に戻って撮影する事ができます。
私達の研究では、リアルタイムな計算で撮影範囲を特定する新しいアプロ―チを提案し、大規模な実験で評価します。このアプローチでは、教師なし学習法を使用して3D再構成を行います。
C2D2アルゴリズム
大腸の内視鏡検査の撮影範囲を検討する場合、検査領域の何パーセントが完全に撮影されたかを撮影割合で推定することが重要です。
遡及的な分析(retrospective analysis)を行う事は医師にとって有用であり、将来の手順に関する一般的なガイダンスを提供することができますが、一定範囲毎に撮影割合をリアルタイムで推定することはより有用です。つまり、結腸を撮影している間にどの部分がどれだけ完全に撮影されたかの知識です。
このような機能の有用性は明らかです。検査の間に、医師は撮影が不十分な範囲があると警告を受け、すぐに戻ってこれらの領域を確認できます。撮影割合が高いほど、ポリープを発見できる割合が高くなります。
C2D2アルゴリズムは、このような範囲毎の撮影割合を2つのフェーズで計算するように設計されています。大腸内視鏡検査ビデオの各フレームの奥行情報(深度マップ)を計算し、これらの深度マップに基づいて撮影割合を計算します。
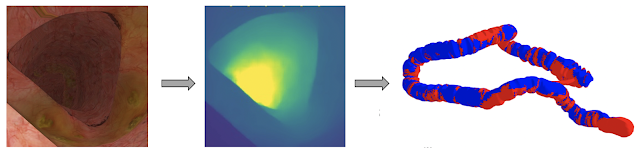
C2D2は、単一のRGB画像から深度画像を計算します。
次に、一連のビデオから計算された深度画像に基づいて、C2D2は局所的な撮影割合を計算します。これにより、C2D2は撮影割合が不十分であり、再確認が必要な場所を検出できます。
深度マップ作成機能は、「深度推定」と「ポーズ推定」の両機能から構成されます。つまり、内視鏡カメラと撮影対象の距離と、カメラのポーズ(内視鏡が指している方向)です。
不十分な撮影割合の検出に加えて、深度とポーズの推定は、他の様々な興味深いタスクに役立ちます。例えば、深度推定は平面的なポリープの検出を改善するために使用できます。その一方、ポーズ推定は内視鏡医が再撮影したい結腸の領域(ポリープを含む)を特定するために使用でき、両方を一緒に使用すれば視覚化と腸内ナビゲーションに使用できます。
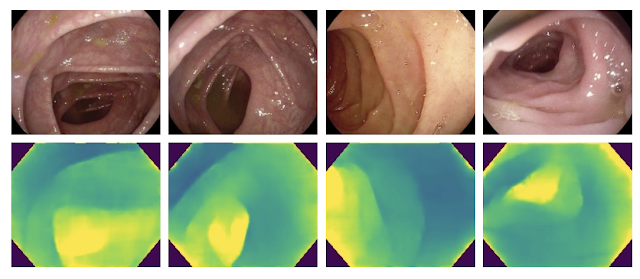
上段:深度計算の元となるRGB画像
下段:C2D2によって計算された深度画像
黄色はより深い位置、青色はより浅い位置を意味しています。
腸のトンネル構造と、結腸膨起が正しく捕捉されていることに注目してください。
こうして作成した深度マップから撮影割合を計算するために、2つのデータソース(合成データと実データ)を使ってC2D2をトレーニングしました。
合成データは結腸のグラフィカルモデルを使用して生成したビデオです。各合成データでは、撮影割合を示すラベルが0(全く撮影できてない)から1(完全に撮影されている)までの数値として学習時に利用できます。実データは、実際の撮影割合がどうであったかを示すラベルは利用できませんが、匿名化された内視鏡検査のビデオを分析しました。
3.機械学習を使用して大腸癌の内視鏡検査の精度を向上(1/2)関連リンク
1)ai.googleblog.com
Using Machine Learning to Detect Deficient Coverage in Colonoscopy Screenings
2)www.ncbi.nlm.nih.gov
Clinical and Biological Features of Interval Colorectal Cancer
3)www.sciencedirect.com
Increased Rate of Adenoma Detection Associates With Reduced Risk of Colorectal Cancer and Death
4)ieeexplore.ieee.org
Detecting Deficient Coverage in Colonoscopies


元投稿ではinterval CRCを「大腸内視鏡検査で陰性となってから60か月以内に大腸癌と診察される割合」と定義しています。参照先の論文「Clinical and Biological Features of Interval Colorectal Cancer」が、大腸癌が癌化するまでにかかる平均期間を5年としているので60か月以内としているのだと思われます。つまり、ポリープの検出率を1%上げると5年毎の定期健診時に見つからなかった「見逃し癌」の割合を6%下げると言う事です。