 画像生成
画像生成 スマホ写真で学習した人工知能はStable Diffusionの画像をどう評価するか?
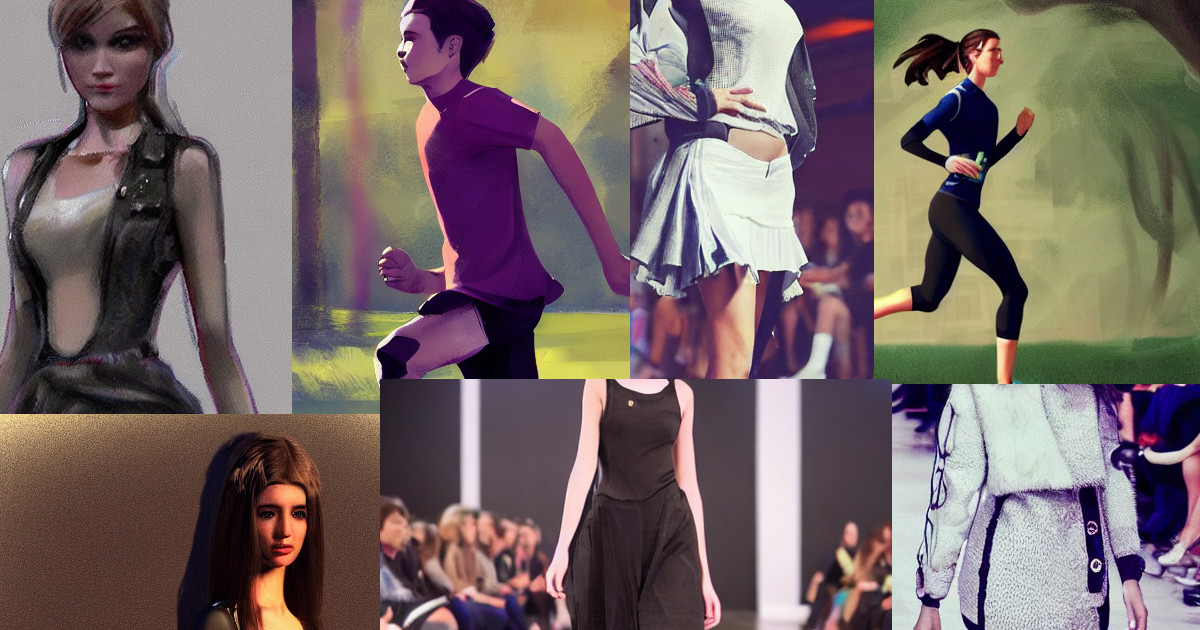
1.スマホ写真で学習した人工知能はStable Diffusionの画像をどう評価するか?まとめ ・写真に写っている人とイラストに描かれている人は人工知能にとって異なる ・スマホ撮影写真の評価を行う人工知能にstable diffusion...
画像生成  ロボット ロボット
ロボット ロボット  その他の調査
その他の調査  モデル モデル
モデル モデル  その他の分野 その他の分野
その他の分野 その他の分野  その他の調査
その他の調査  入門/解説
入門/解説  データセット データセット
データセット データセット