 入門/解説
入門/解説 Reference-only ControlNet:ついに前処理さえ不要になったコントロールネット
1.Reference-only ControlNet:ついに前処理さえ不要になったコントロールネットまとめ ・ControlNetがアップデートにより「前処理せずとも参照画像と似た画像を作れるようになった!」というニュースが昨日あった ・...
入門/解説  入門/解説
入門/解説  ヘルスケア
ヘルスケア 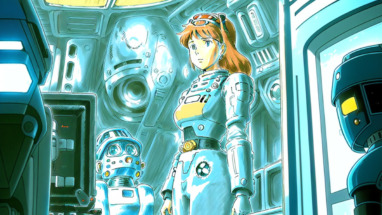 ロボット ロボット
ロボット ロボット  入門/解説
入門/解説  ヘルスケア ヘルスケア
ヘルスケア ヘルスケア 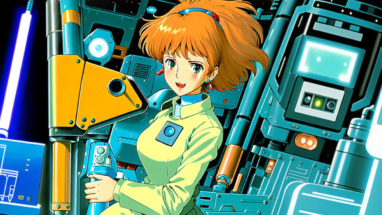 モデル ロボット
モデル ロボット  入門/解説
入門/解説  入門/解説
入門/解説